

面向星表狭小空间巡检的绳驱大变形爬行机器人机构设计与参数优化
能源与动力工程
资助企业:
 上海航天控制技术研究所
上海航天控制技术研究所
资助年份: 2026
企业导师: 王国鹏

指导教师: 韩向新
项目成员: 刘书哲 廖志恒
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
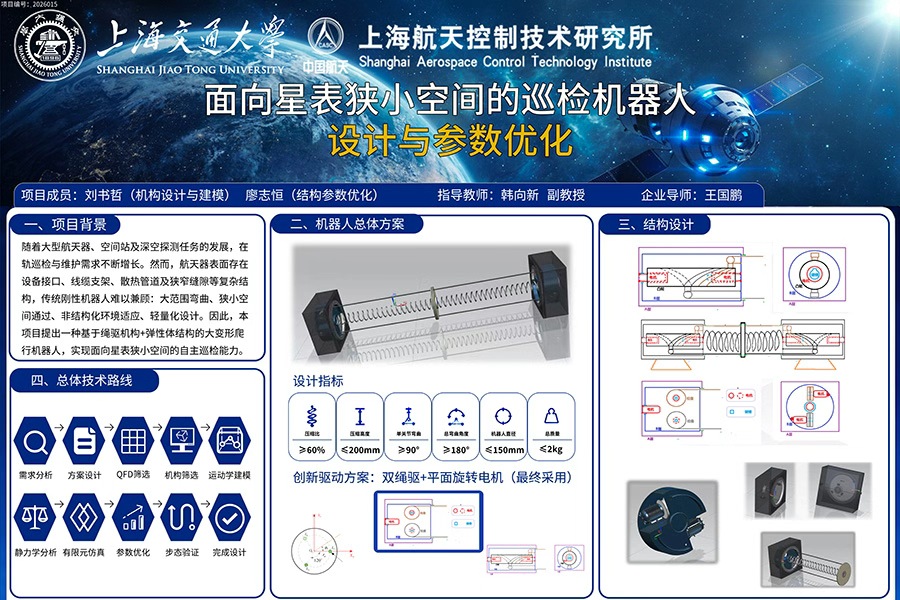
近年来,随着我国航天技术的快速发展,大型航天器在轨故障风险日益凸显,零部件老化、空间碎片撞击等问题严重影响任务可靠性与寿命。重新发射替代成本高昂且浪费轨道资源,因此在轨巡检与维护具有重要经济效益。现有空间站机械臂虽能完成多种任务,但其尺寸与构型难以适应非结构化星表环境的巡检需求。本项目面向非结构化星表环境下的航天器在轨巡检需求,围绕尺蠖爬行机器人的变构型设计与运动规划开展研究,旨在为我国未来高性能在轨巡检机器人的研制提供理论依据与技术支撑。
项目目标
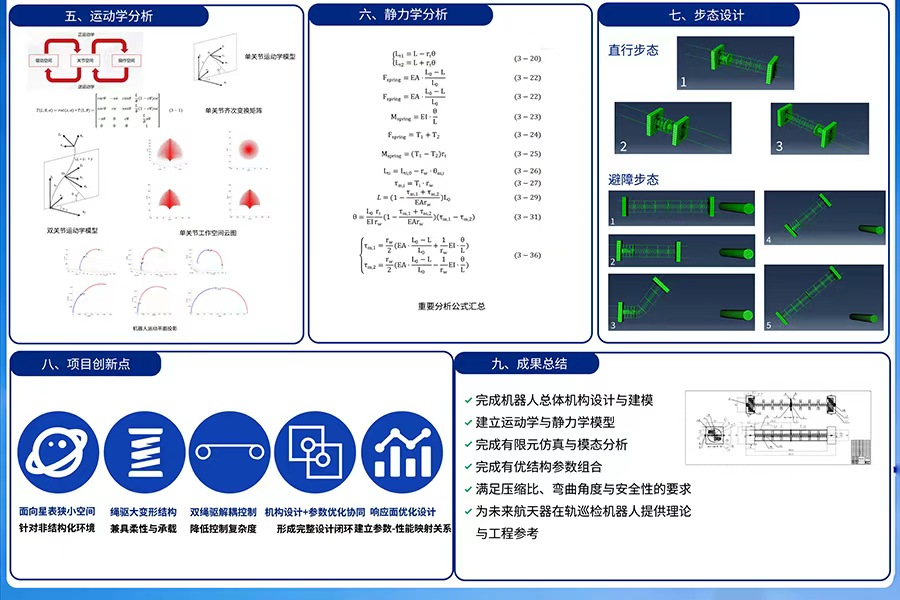
项目的总体目标是设计一种面向星表狭小空间巡检任务的绳驱大变形爬行机器人,完成结构模型设计和设计参数优化:(1)建立机器人的整体结构模型。(2)进行机器人步态规划仿真,验证爬行、转向、越障等基本运动的可行性。(3)对弹性关节和主体结构进行静力学及模态分析,验证其在负载下的强度与变形量。(4)建立机器人的运动学模型和静力学模型,建立驱动控制的理论模型。(5)对弹性体厚度、绳缆张力等关键设计参数进行优化分析,阐明各参数对通过性和能耗效率的影响规律
项目成果
本项目成功设计了一款面向星表狭小空间巡检的绳驱大变形爬行机器人。通过对比三绳驱动、凸轮驱动及双绞盘驱动方案,最终确定以“两根驱动绳+平面旋转电机”为核心的双绞盘驱动方案,有效降低了控制复杂度与结构尺寸,实现了纵向压缩比≥60%、横向弯曲≥180°的设计目标。基于单/双关节运动学与静力学模型,建立了驱动空间至操作空间的完整映射关系。借助有限元分析与步态仿真,优化了弹簧中径(20–21 mm)与弯矩(150–157.5 N·mm)等关键参数,使最大应力控制在300 MPa以内,变形量达90–100 mm。完成了机器人三维建模与工程图绘制,验证了结构在低重力环境下的力学可行性与抗冲击、减隔振能力。




