

深腔阀座密封筋接触式轮廓测头研制及其加工精度评价
机械工程资助企业: 武汉龙灵数智科技有限公司
资助年份: 2026
企业导师: 刘城

指导教师: 黄诺帝
项目成员: 徐智盛 秦敏皓 褚咏恩
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
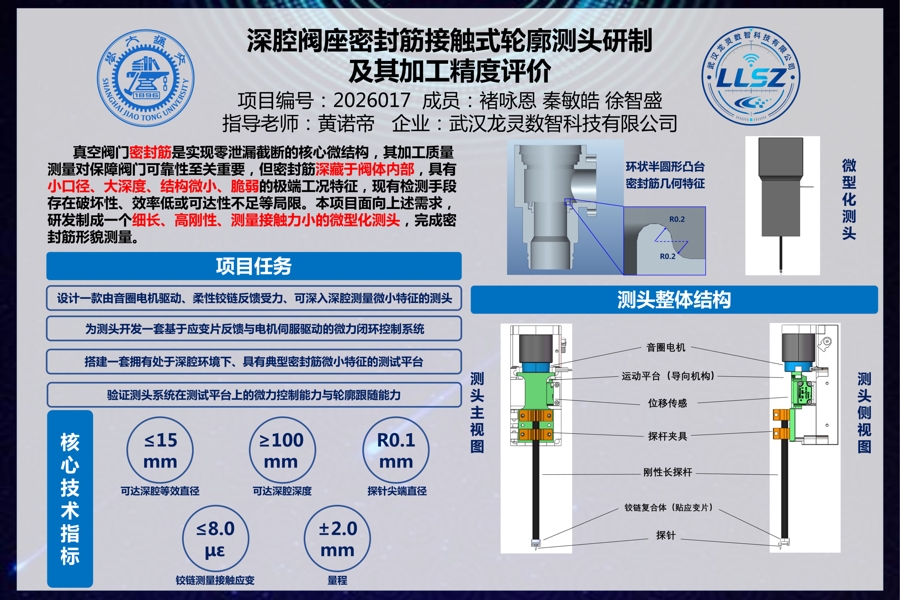
深腔阀座密封筋是真空阀门实现可靠密封的关键微结构,其轮廓形貌直接影响阀门密封性能。由于密封筋位于小口径(Φ12-80mm)、大深度(>70mm)的狭窄深腔内部,常规三坐标测量、触针轮廓仪和光学方法在测头进入、接触控制和信号稳定性方面存在显著局限。针对上述问题,本项目研制了一款微型化测头系统,采用模块化串联式总体架构,将音圈电机等大体积组件置于上部,探针与柔性铰链等精密结构置于下部,通过碳纤维中空探杆实现运动传递与信号传输,为深腔微结构精密测量提供了一套完整的机械结构解决方案。
项目目标
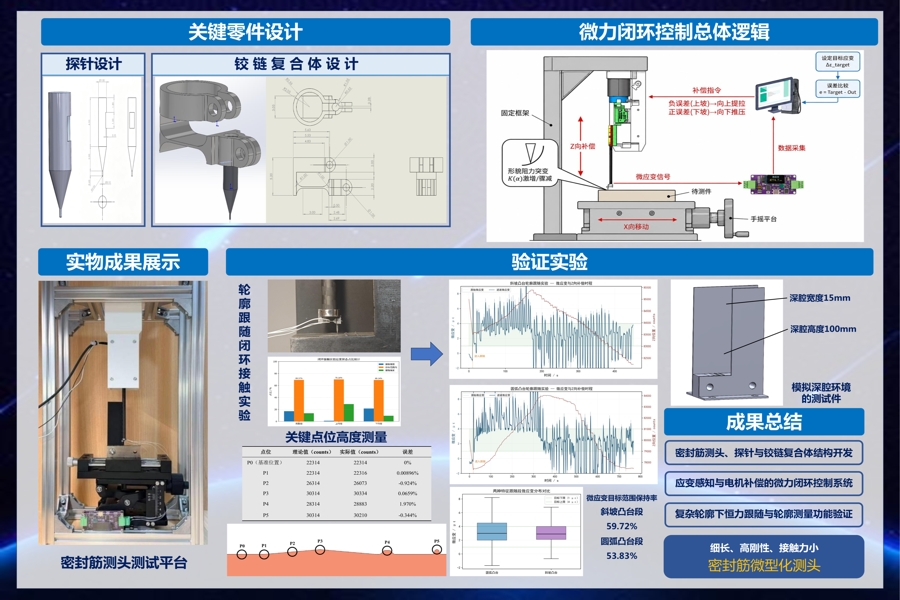
本项目旨在攻克深腔密封筋精密测量的核心技术难题,主要目标包括:设计满足深腔可达性要求的串联式细长测头构型,径向轮廓控制在Φ20mm以内;研制一款兼顾前端无干涉可达性与整体抗弯刚度的探针,在10mN工作载荷下尖端挠度控制在亚微米量级;开发集成力-应变转换功能的柔性铰链复合体,配合半桥应变感知链路实现毫牛级接触力检测;建立基于应变反馈的音圈电机Z向主动补偿闭环控制系统,使探针在轮廓变化过程中维持稳定接触状态,为后续密封筋轮廓点列采集与形貌评价提供技术基础。
项目成果
本项目成功研制了深腔密封筋笔式测头样机并搭建了实验验证平台。主要成果包括:提出了音圈电机-碳纤维探杆-柔性铰链-探针串联式总体构型,完成全要素三维建模与装配干涉检查;设计了有效工作长度满足要求的分段式钨钢探针,理论校核与有限元仿真验证了力学性能;编写了Z向主动补偿闭环控制程序,进行了轮廓跟随实验,实验表明缓坡特征目标范围保持率达59.72%,圆弧特征保持率达53.83%,Z向补偿连续平滑,验证了系统微力接触闭环控制方案的可行性。




