

人形机器人在工厂环境下的建图导航评估和优化
机械工程
资助企业:
 上汽通用动力科技有限公司
上汽通用动力科技有限公司
资助年份: 2026
企业导师: 徐啸顺

指导教师: 贡亮
项目成员: 付卓言 李洋 朱梓优 未天宇
 项目海报
项目海报


 项目视频
项目视频
 项目简介
项目简介
项目概述
本项目面向工厂制造背景下轮式人形机器人在工业车间中的建图、定位、场景识别、路径规划与导航评估需求,针对地图质量难以任务化量化、工位与障碍物变化难以及时识别、复杂通道中定位易退化、动态障碍下重规划效率不足等问题,构建覆盖“地图评估—环境感知—鲁棒定位—高效导航”的综合优化方案。项目以A2-W平台为对象,融合PointNet++点云语义分割、Qwen-VL多模态评估、MFEAD-SODNet与改进Canny边缘识别、LiDAR/RGB-D 跨模态切换定位及A*—D*Lite融合规划,为真实工业场景部署提供验证基础。
项目目标
项目目标是形成一套面向工业任务的建图导航评估与优化流程。首先,通过点云语义分割和二维栅格地图特征提取,建立兼顾几何、语义、拓扑和任务可用性的SLAM地图质量评价方法。其次,面向工厂全景图像低光、畸变和遮挡问题,构建边缘增强与环境变化量化识别方法,支撑地图更新与二次建图决策。再次,搭建AMCL-LiDAR主定位和 RTAB-Map RGB-D辅助定位链路,设计基于综合置信度的跨模态切换机制。最后,融合A*全局规划与D*Lite动态重规划,实现高效路径规划与避障验证,分析地图质量、定位稳定性和导航执行效果的关系。
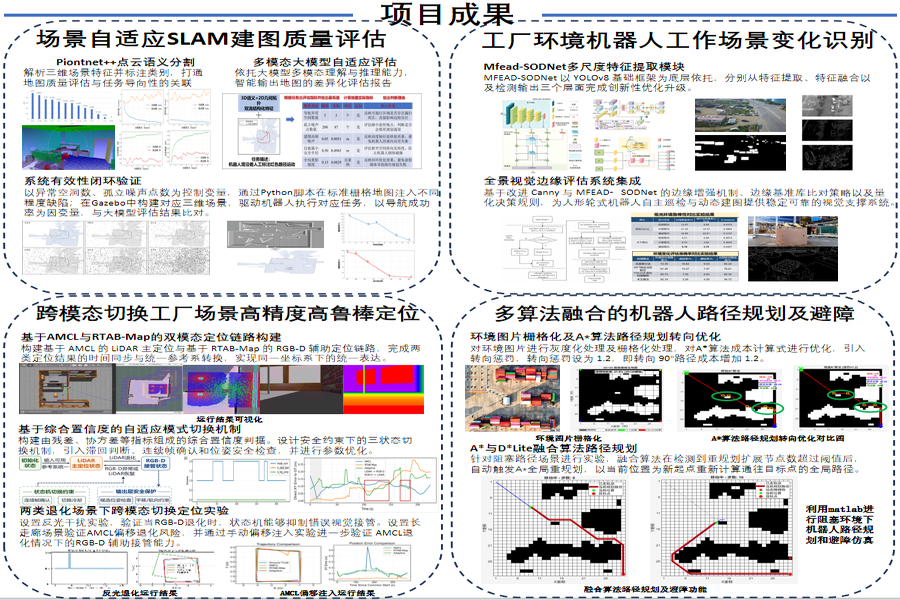
项目成果
项目形成了面向工业环境的建图导航评估与优化原型。建图评估方面,完成PointNet++语义分割、3D语义与2D拓扑双流特征提取及Qwen-VL任务导向评估,并通过空洞、噪声变量实验验证评估结果与导航成功率相关。场景识别方面,构建全景视觉预处理、MFEAD-SODNet特征增强、改进Canny边缘提取和变化判定流程,实现低光复杂场景下的环境变化识别。定位方面,实现LiDAR-AMCL与RGB-D RTAB-Map双模态定位、统一参考系和退化接管。导航方面,完成A*—D*Lit融合规划,提升动态避障和重规划效率。




