

电梯井道无人巡检系统自主控制技术研究
机械工程
资助企业:
 芬兰通力电梯有限公司
芬兰通力电梯有限公司
资助年份: 2026
企业导师: 郭凯

指导教师: 史熙
项目成员: 宋申泽
 项目海报
项目海报


 项目视频
项目视频
 项目简介
项目简介
项目概述
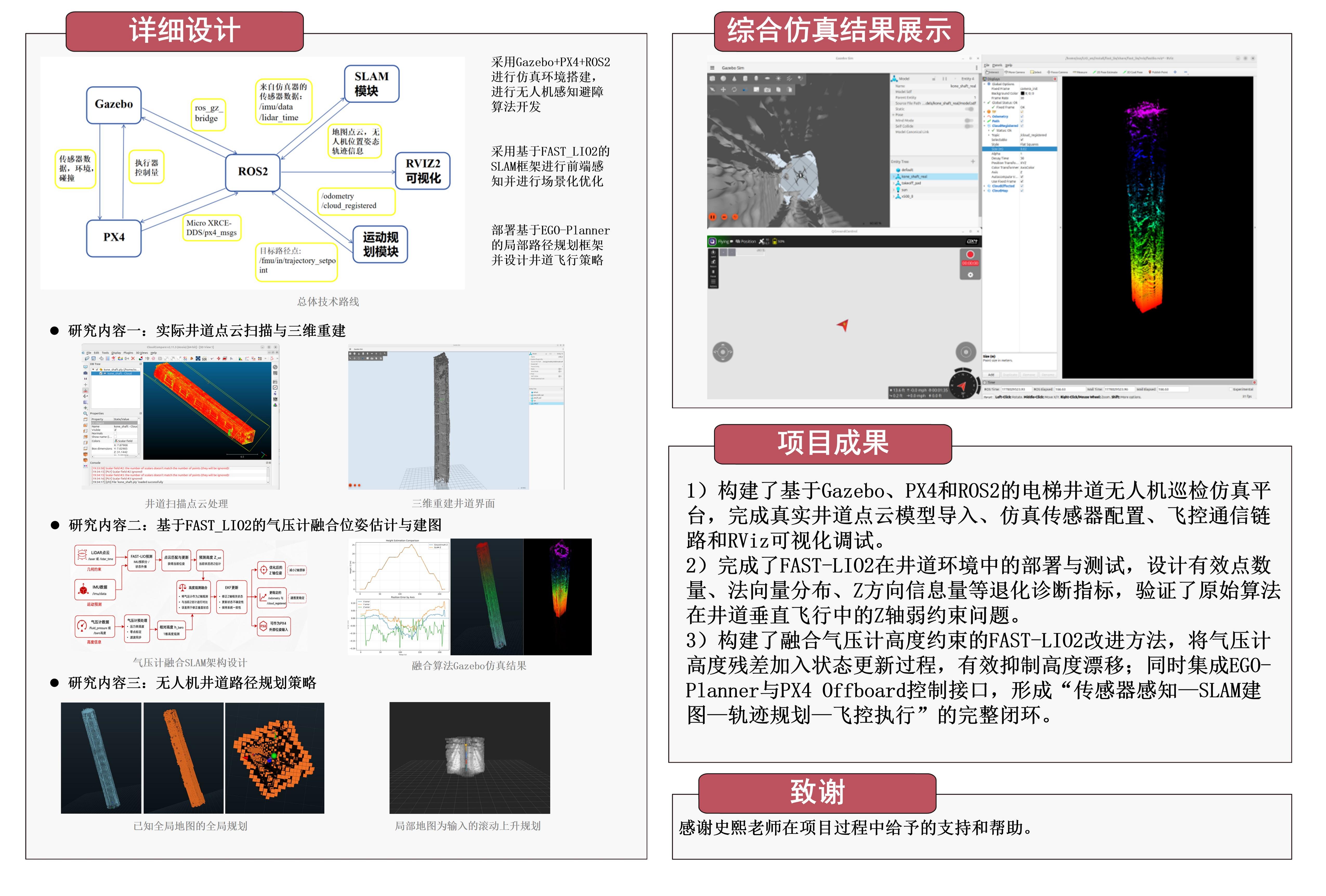
电梯井道具有空间狭窄、结构重复、光照不足、GPS信号缺失等特点,传统人工巡检方式存在效率低、风险高和作业受限等问题。本项目面向电梯井道无人化巡检需求,构建基于Gazebo、PX4和ROS2的无人机井道巡检仿真系统,采用FAST-LIO2实现激光惯性定位与建图,并针对井道垂直方向约束不足导致的高度漂移问题引入气压计辅助观测。同时结合EGO-Planner完成局部路径规划与飞控闭环验证,为后续真实井道无人机自主巡检提供算法与系统基础。
项目目标
本项目旨在实现电梯井道环境下无人机自主巡检的仿真验证与关键算法改进。首先,搭建包含井道环境、无人机模型、传感器模型、PX4飞控和ROS2通信链路的完整仿真平台;其次,部署FAST-LIO2激光惯性SLAM算法,分析其在垂直井道中出现Z轴退化和高度漂移的原因;最后,引入气压计高度约束改进垂向定位稳定性,并结合EGO-Planner设计井道中心保持与局部避障策略,实现“感知—建图—规划—控制”的闭环飞行验证。
项目成果
本项目完成了电梯井道无人机巡检仿真平台搭建,实现Gazebo、PX4、ROS2、FAST-LIO2、EGO-Planner等模块间的数据交互与系统集成。通过仿真实验验证了FAST-LIO2在井道环境中的定位建图能力,并利用有效点数量、法向量分布、Z方向信息量等指标分析了垂向退化问题。在此基础上,构建了融合气压计高度约束的FAST-LIO2改进方法,有效抑制Z轴高度漂移;同时完成局部轨迹规划和PX4 Offboard控制接口接入,实现无人机井道中心保持、平滑轨迹生成与闭环飞行。




