

本体感知驱动的机器人路径规划算法
机械工程
资助企业:
 源络科技(上海)有限公司
源络科技(上海)有限公司
资助年份: 2026
企业导师: 孟昭时

指导教师: 董兴建
项目成员: 沈渭清 胡岩淼 尚硕 张保康
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
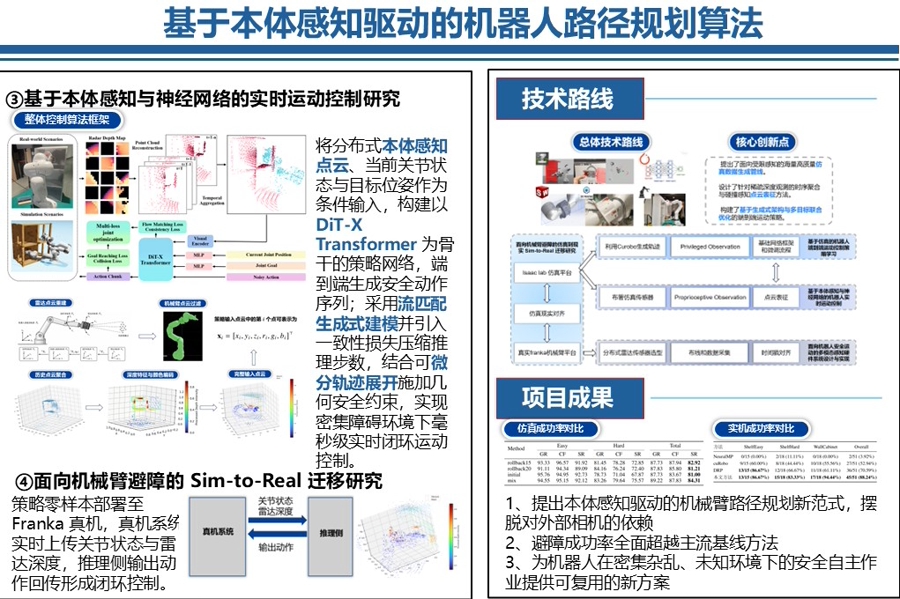
面向机器人在密集杂乱、几何未知环境中自主操作的任务需求,针对当前主流视觉运动策略依赖外部相机所导致的视角遮挡、标定复杂、相机位移敏感和感知盲区显著等问题,有必要研究不依赖外部视觉、由机器人本体感知直接驱动的路径规划算法。本体感知驱动的方法将传感器与机械臂运动紧密耦合,具备近场几何敏感性高、部署便捷、对相机摆放无依赖、适用于密集障碍与狭窄通道场景的优点,本项目以此为背景进行基于本体感知驱动的机器人路径规划算法的开发。
项目目标
本项目聚焦于研发一套仅依靠机器人本体感知即可在密集障碍环境中生成安全可达轨迹的路径规划算法。首先需完成分布式本体感知方案设计:在机械臂末端附近共形布置多路 ToF 深度传感器,通过 3D 打印支架实现近 360° 局部覆盖,并将分布式稀疏深度读数经时序聚合转化为避障感知点云。同步进行算法仿真与验证:基于流匹配生成式策略构建路径规划网络,联合优化目标到达与碰撞避免目标,并通过可微分轨迹展开施加几何安全约束。最终需完成物理样机研制与实验:集成本体感知硬件、轻量化驱动模块与自主控制软件,验证算法在多类杂乱场景下的可靠性。
项目成果
(1)完成基于本体感知的机器人路径规划算法感知系统设计,包括分布式 ToF 传感器布局、共形支架结构设计与本体感知点云构建,开展感知与运动模式仿真,进行参数优化,获得本体传感系统的关键参数并完成选型。
(2)完成基于本体感知的路径规划算法设计,包括算法架构、训练策略与损失函数设计,开展算法仿真,提出适用于本体感知输入的安全路径生成算法,包含障碍邻近终点采样、流匹配策略训练、可微分轨迹展开等关键环节。
(3)研制出基于本体感知驱动的机器人路径规划样机 1 台,开发出算法软件 1 套,开展实验验证研究,验证算法的功能和性能,完成研究报告 1 份。




