

高附加值果蔬巡检机器人的多模态信息融合分析
机械工程
资助企业:
 中建材凯盛机器人(上海)有限公司
中建材凯盛机器人(上海)有限公司
资助年份: 2026
企业导师: 高昌颀

指导教师: 袁成刚
项目成员: 田心喆、斯宁锋、张宸、刘一笑
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
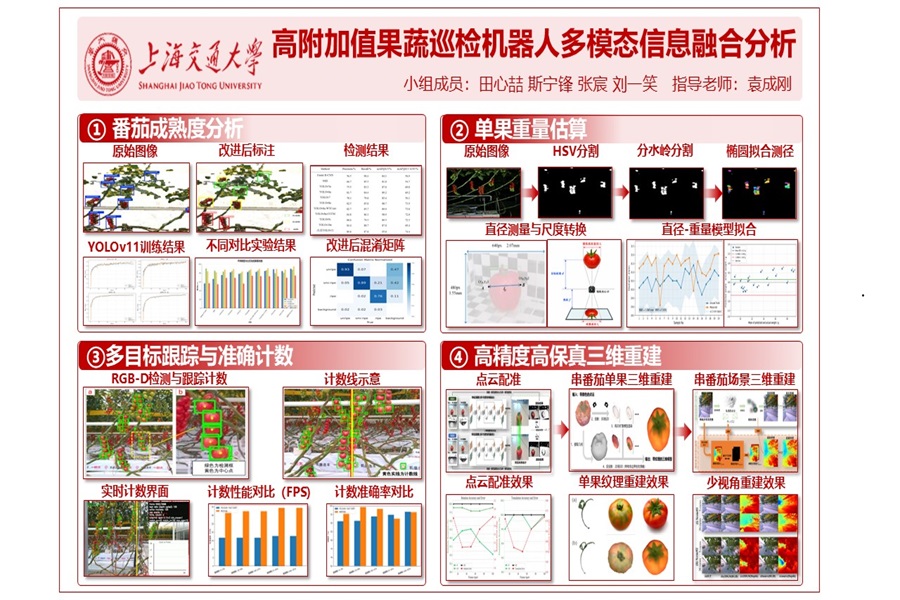
高附加值果蔬巡检机器人多模态信息融合分析项目面向智慧农业场景,围绕温室串番茄等高附加值果蔬的智能巡检需求展开研究。项目基于RGB-D相机、多模态感知技术与农业机器人平台,融合计算机视觉、深度学习、三维重建和智能分析方法,实现果实成熟度识别、目标跟踪计数、重量估算以及三维场景重建等功能。通过构建感知、分析与决策一体化技术体系,提升农业生产过程的信息化、数字化和智能化水平,为精准种植、产量评估和智能管理提供技术支撑。
项目目标
项目旨在构建一套面向高附加值果蔬巡检机器人的多模态信息融合分析系统。通过融合RGB图像、深度信息与三维点云数据,实现复杂温室环境下果蔬目标的稳定感知与精准分析。重点完成果实成熟度自动识别、单果重量估算、果实跟踪计数以及高精度三维重建四项核心任务,提升系统在复杂光照、遮挡及密集生长条件下的鲁棒性与实时性。同时推动相关算法向农业机器人平台部署,为智慧农业生产提供高效、低成本的智能巡检解决方案。
项目成果
项目完成了多项关键技术研发与系统验证工作。在成熟度分析方面,提出改进YOLO模型,实现复杂光照条件下的高精度识别;在产量评估方面,建立基于直径测量的重量估算方法,实现单果重量精准预测;在目标跟踪与计数方面,构建轻量化短时事件关联框架,实现实时稳定计数;在三维重建方面,融合PointMBF、PointDreamer与DRGS等方法,实现高精度点云配准、纹理恢复和少视角场景重建。项目形成完整技术体系,并具备面向农业机器人实际部署的应用潜力。




