

面向激光切割料框的零件分拣系统设计与控制
机械工程
资助企业:
 上海柏楚电子科技股份有限公司
上海柏楚电子科技股份有限公司
资助年份:
企业导师: 石斌

指导教师: 吴建华
项目成员: 朱骏晖、王泽
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
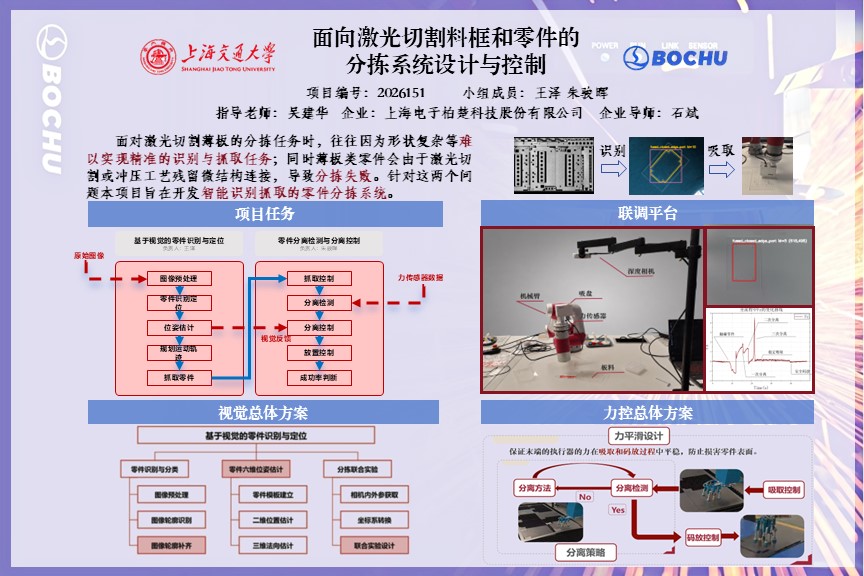
本项目为校企合作课题,由上海柏楚电子科技股份有限公司提供工程背景,面向激光切割后处理工序中薄板零件的自动化分拣需求。激光切割零件形状复杂、规格多样、摆放无序,且零件与料框之间常保留微连接点而未完全分离,传统仅依赖位置控制的机械臂难以感知接触状态,易出现抓取失败与零件损伤。项目以零件分拣机器人为研究对象,构建了一套融合机器视觉识别与力反馈控制的检测与控制系统:通过视觉感知完成零件识别、定位与六维位姿估计,通过六维力传感器与导纳控制实现薄板零件与料框的柔顺分离,形成从感知、决策到执行的完整闭环。
项目目标
项目主要目标是面向复杂工业场景,开发一套高可靠、高柔性的薄板零件自动化分拣系统,重点解决三方面关键问题:一是在复杂光照、金属反光与切割微连接点干扰下,实现料框中多类零件的稳定识别、精准定位与位姿估计;二是基于六维力传感器与导纳控制,准确判别零件与料框的分离状态,并设计自适应分离策略,在不损伤薄板零件的前提下实现微连接点的可靠断裂;三是完成视觉系统与机器人执行空间的手眼标定与集成,构建从图像采集、目标识别、位姿估计、坐标转换到抓取分离的全流程闭环,并通过实验验证方法的工程可行性。
项目成果
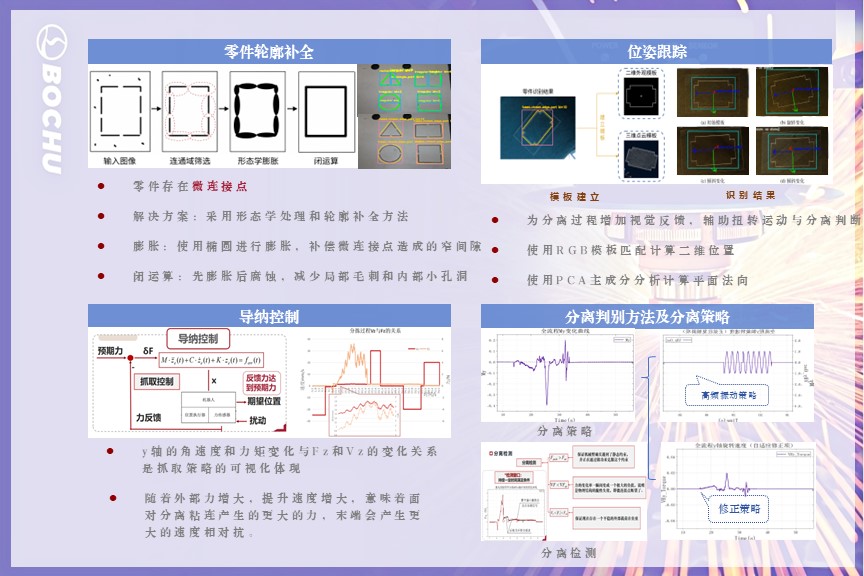
项目按视觉识别与力控分离两条主线协同推进,形成完整技术体系。视觉方面,建立了基于CLAHE增强、自适应二值化、Canny边缘检测与形态学补全的图像处理流程,并融合RGB模板匹配与点云PCA实现六维位姿估计,零件识别成功率达83%。力控方面,建立了从六维力传感器到工具坐标系的力学变换链与质量-阻尼导纳控制律,提出融合力梯度突变、准静态低力平衡与滑动窗口确认的多维分离判据,并设计“拉-剪-扭”复合力控分离策略,分离成功率达90%。最终搭建了集协作机械臂、力传感器、深度相机与吸盘执行器于一体的实验平台,完成手眼标定与联合抓取分离实验,验证了系统在实际分拣场景中的可行性。




