

基于光学设计与视觉反馈的高精度DLP打印系统
机械工程
资助企业:
 北京术锐机器人股份有限公司
北京术锐机器人股份有限公司
资助年份:
企业导师: 陈煜阳

指导教师: 王东
项目成员: 刘宇琛、吕世博
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
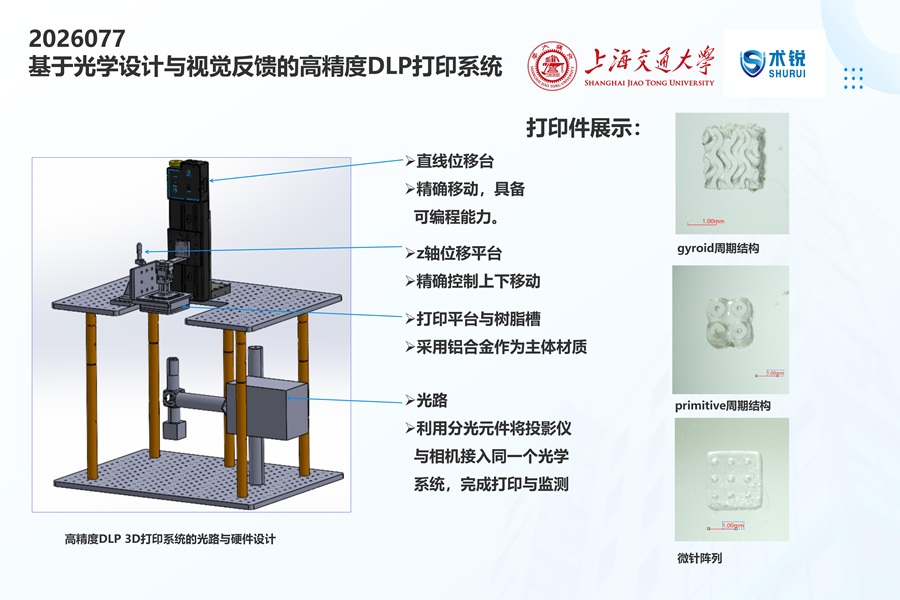
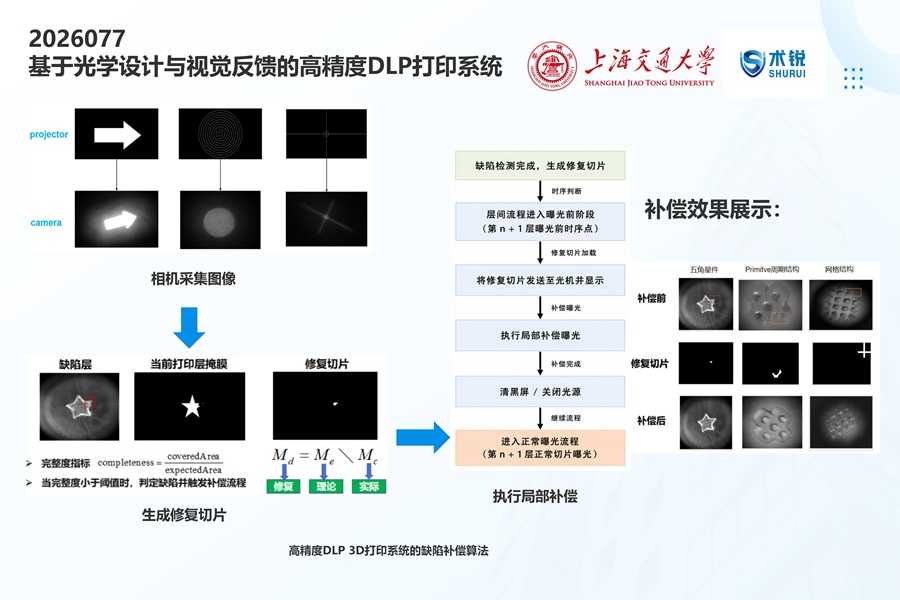
本项目针对数字光处理(DLP)光固化 3D 打印在微结构制造中面临的精度瓶颈问题——包括投影像素尺寸限制、光场分布不均及固化过程不可实时监测等核心挑战,提出一套融合光学增强与视觉反馈的高精度闭环控制系统解决方案。通过创新 设计透镜组合实现投影光路缩放,优化光场均匀性并建立标定模型,突破硬件物理 限制;集成工业相机对固化界面进行实时监测,开发基于边缘检测与区域分割的先 进算法,精准识别欠填充缺陷;构建曝光能量-固化响应动态模型,结合度调制与抗锯齿补偿算法,实现曝光参数自适应调整,显著提升线宽精度与复杂曲 面成形质量。
项目严格遵循质量功能展开(QFD)规范,将打印精度、效率、材料兼容性等 六大客户需求转化为五项核心工程措施:含光路仿真与透镜选型的高精度光学系统 设计、实时图像处理算法开发、支持参数调控与数据存储的集成化控制软件平台搭建、及硬件平台优化。执行计划分三阶段推进:完成光学设计、机械装配及相机标定,开发实时监测算法与闭环控制软件;通过微针阵列等典型应用验证打印性能,并优化系统集成方案。
项目目标
1、构建出一台功能完善、具有展示性和实用性的模型样机,注重打印质量及精度。
2、将高分辨率光学透镜设计、相机实时监测与灰度调制曝光策略相结合,通过透镜组合实现投影缩放与成像增强,在有限光机条件下获得更小的有效成形尺寸。
3、结合图像处理与误差识别算法,捕捉打印过程中的形貌偏差和光剂量分布不均;进一步将这些监测结果反馈到曝光参数与灰度图案生成中,实现对打印过程的闭环调整与精细补偿,从而显著提升小尺寸结构与复杂轮廓的成形质量。
项目成果
成功开发具备高精度的 DLP 原型机;完成 DLP 高精度打印系统的光学设计与硬件平台设计,完成基于视觉反馈的高精度 DLP 算法设计。进行微针阵列、TPSM周期结构等多种精密结构的打印测试,实现了较小的正负分辨率,使用缺陷打印件进行测试,验证机器能够完成对缺陷的反馈与补偿。




