

AI路径规划方法研究
机械工程
资助企业:
 AI路径规划方法研究
AI路径规划方法研究
资助年份:
企业导师: 王智强

指导教师: 杨林
项目成员: 黄易 陈锦
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
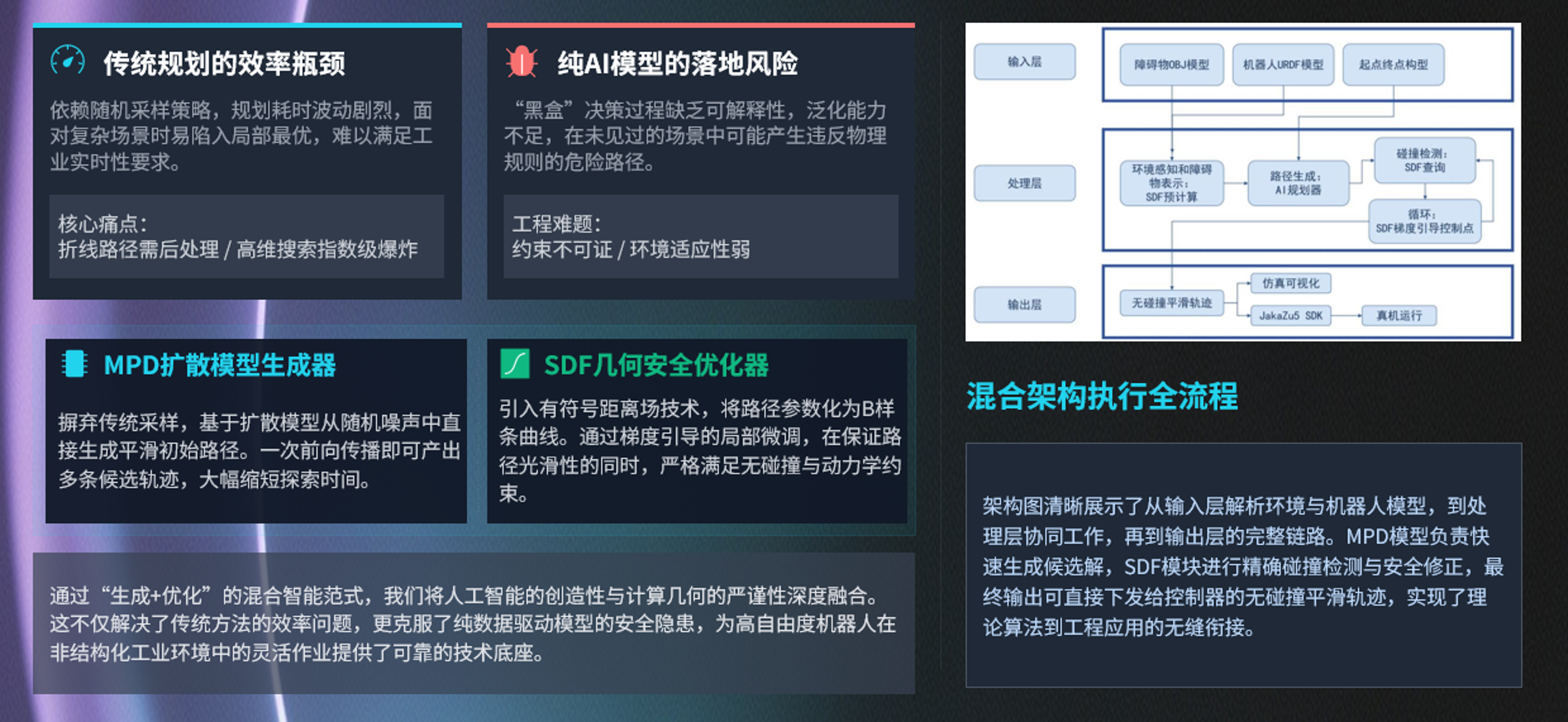
本项目为校企合作毕业设计项目,聚焦复杂工业场景下工业机器人路径规划难题,针对传统方法效率不稳、路径质量差与纯 AI 方法可解释性、安全性不足的问题,提出融合人工智能与几何算法的混合架构路径规划方案。项目以 Motion Planning Diffusion(MPD)算法为核心,结合 B 样条参数化、有符号距离场(SDF)碰撞检测及梯度引导优化,依托 JAKA Zu5 机器人等平台构建工业场景数据集,完成模型训练、系统集成与真机部署,为工业机器人智能化路径规划提供可落地的技术方案。
项目目标
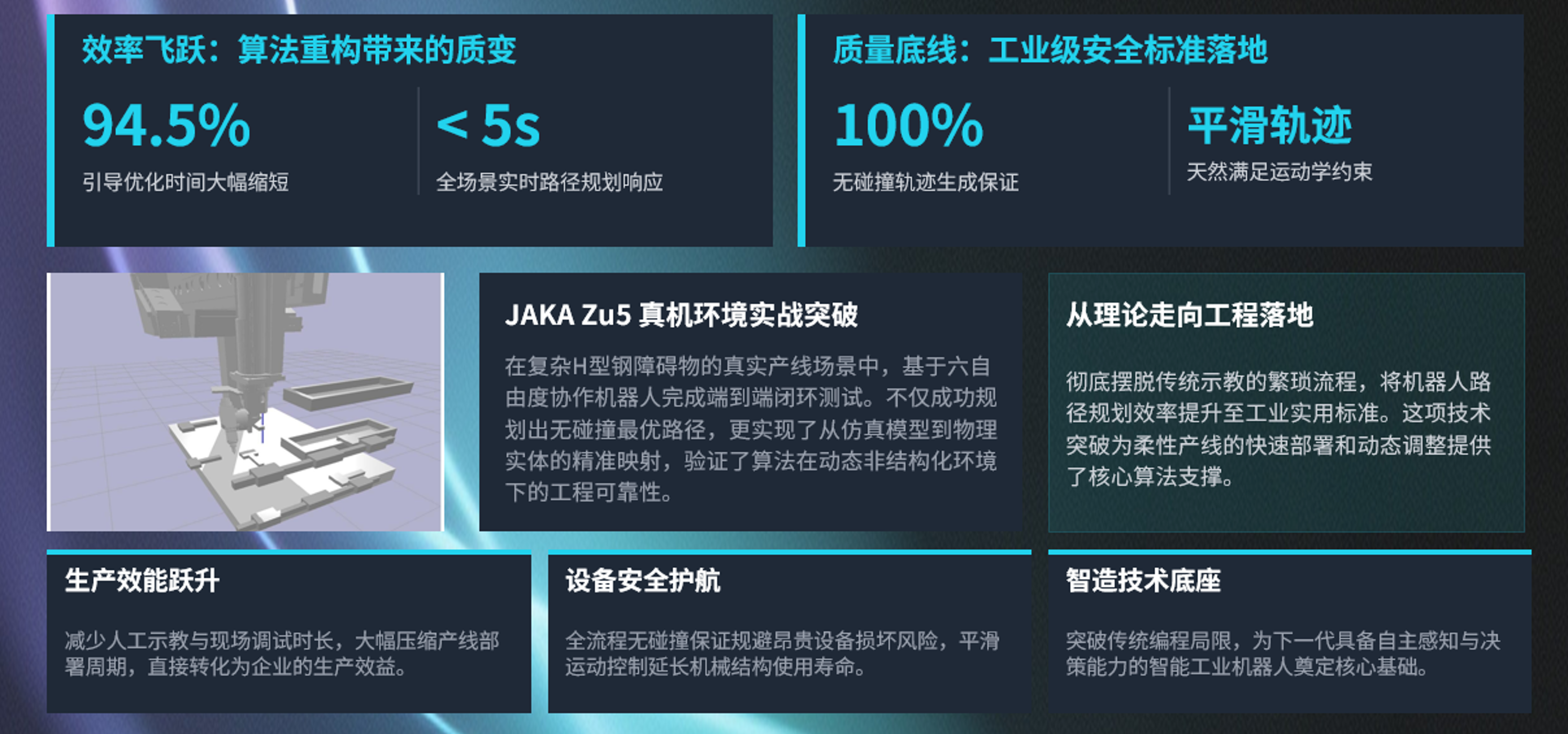
项目旨在设计基于 MPD 算法的高性能路径规划方法,在满足机器人运动学、避障与工业安全约束的前提下,实现无碰撞、平滑轨迹的快速生成。核心目标为将整体规划时间控制在 5 秒内,优化后接近实时水平;保障路径无碰撞、连续平滑,适配多构型机器人与多样化工业场景;完成仿真验证与真机部署,验证方案工程可行性;兼顾规划效率、路径质量与安全性,解决工业机器人路径规划多重瓶颈,满足企业对通用 AI 轨迹规划器的实际需求。
项目成果
项目成功研发混合架构路径规划系统,预计算网格法使引导优化时间缩短约 94.5%,整体规划时间控制在 5 秒内。系统可生成无碰撞、平滑且符合运动学约束的轨迹,适配 JAKA Zu5、五轴机床等多类机器人平台,完成真机部署并成功输出三条无碰撞轨迹。项目形成完整技术链路,解决传统与纯 AI 方法的核心缺陷,满足企业工业场景应用需求,同时明确模型泛化与高频轨迹生成的优化方向,为工业机器人柔性制造与智能化升级提供技术支撑。




