

具身智能人形机器人仿生视触觉感知算法
机械工程
资助企业:
 湖南朗灵科技有限公司
湖南朗灵科技有限公司
资助年份: 2026
企业导师: 王金行

指导教师: 胡开明
项目成员: 刘承禹、李文嘉、景伊然、梁羽康
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
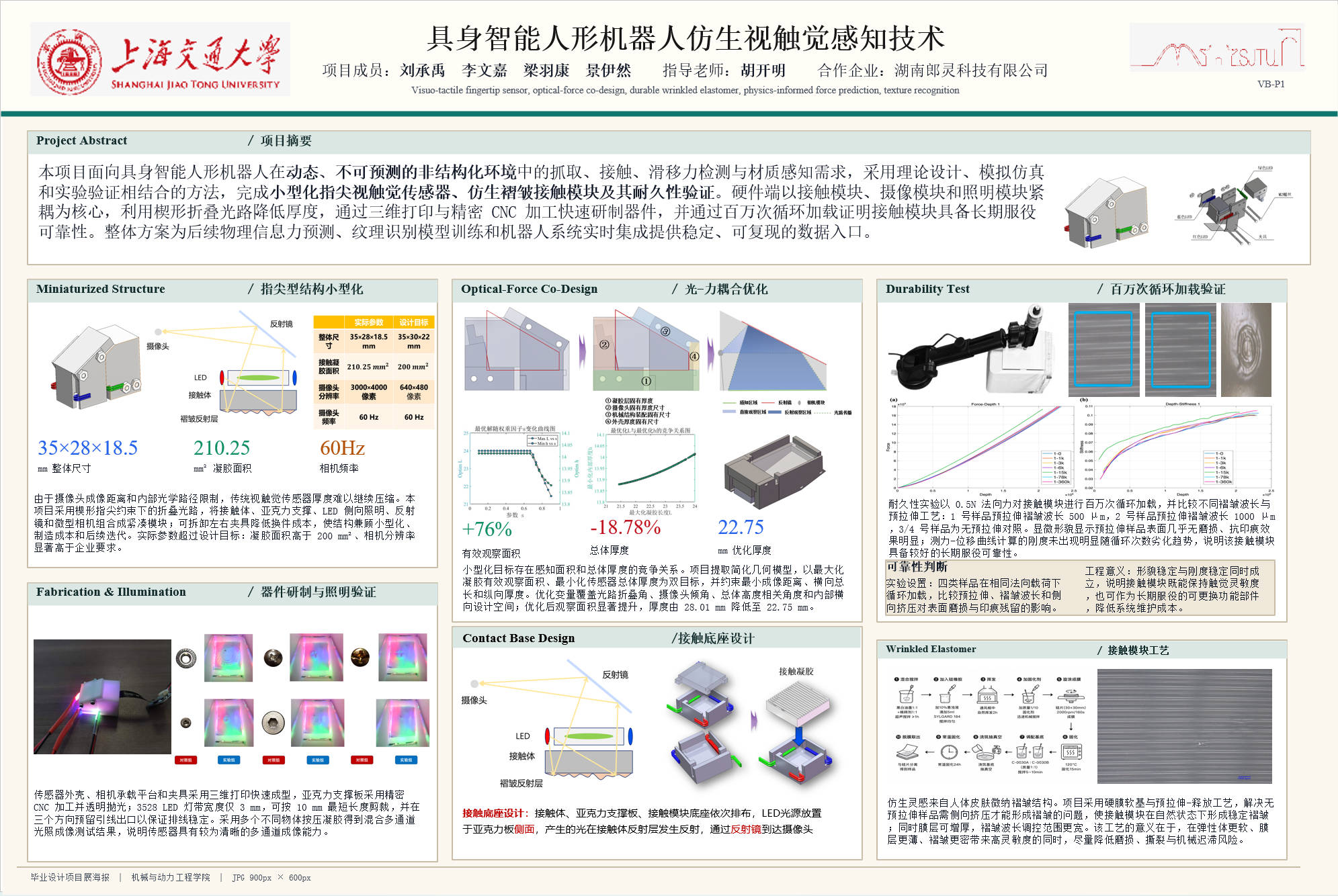
本项目聚焦于具身智能人形机器人的仿生视触觉感知技术,旨在突破当前触觉传感器在灵敏度、体积与材质辨识能力上的瓶颈。项目提出一种基于自组装微纳褶皱结构与微型热敏单元集成的新型指尖传感器方案,通过“仿生微纳结构—多模态融合—智能算法—系统集成”的技术路线,融合柔性接触界面的工艺优化、紧凑型折叠光路的小型化设计、多模态感知链路的构建,致力于实现对复杂目标物的高保真三维形貌重建与精准材质属性判别,为机器人在非结构化环境下的精密灵巧操作提供关键技术支撑。
项目目标
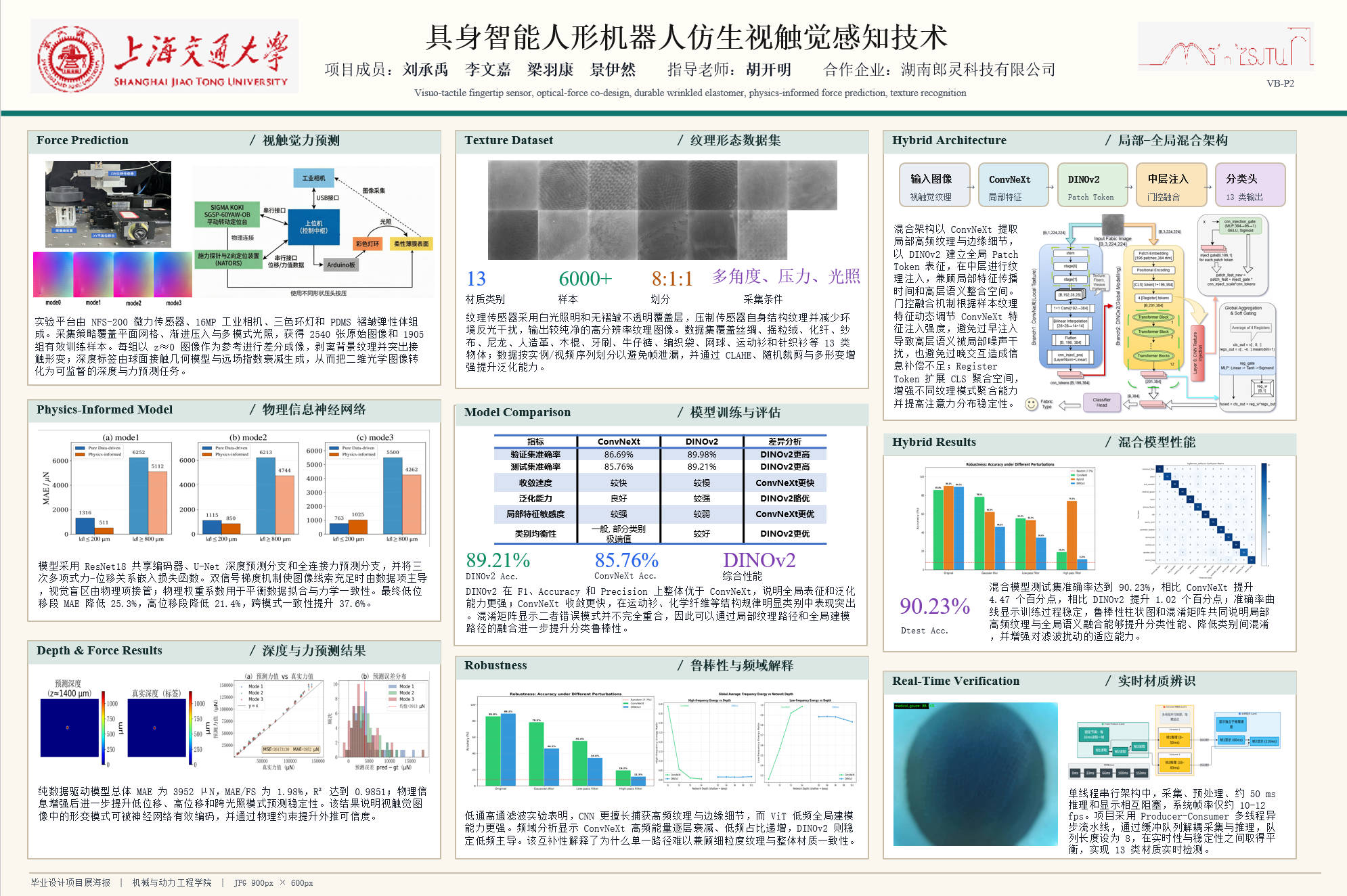
本项目旨在研制一款具备高灵敏度、小型化及材质辨识能力的指尖型视触觉传感器。具体目标包括:硬件层面,利用自组装工艺制备微纳褶皱接触层以增强切向力感知及耐久性,并通过紧凑型光路与超微型摄像模组设计,将传感器整体体积控制在35x30x22mm³以内。算法层面,开发融合物理信息神经网络与对抗生成网络的深度学习模型,从光学图像中高精度反演三维形貌与接触力分布,并在无需大量人工标注的条件下,实现对10类以上复杂材质的判别,分类准确率不低于80%。系统验证层面,完成传感器在二指机械手上的集成,设计基于材质识别结果的自适应抓取策略与闭环控制机制,实现对滑移前兆的感知与抓取力的动态调节。
项目成果
本项目交付一套完整的仿生视触觉感知系统,包含硬件原型、算法模型及系统集成验证平台。硬件成果上,产出基于自组装微纳褶皱结构的小型化指尖型视触觉传感器,具备抗电磁干扰、高空间分辨率与多模态感知能力,并建立其制备工艺优化与耐久性测试标准。算法成果上,构建一套从光学图像到力学信息、材质属性的端到端智能解析算法,包括高精度的三维重建模型、融合物理先验的力预测网络,以及包含多种材质纹理的结构化数据库。系统验证方面,在机器人灵巧手平台上实现传感器的无缝集成,并通过闭环控制实验验证其在高保真形貌重建、精准材质辨识及自适应抓取任务中的有效性,最终形成从底层微纳感知增强、多模态硬件集成到顶层智能化决策的完整技术方案。




