

带并联腰的仿生四足机器狗的结构设计与实验
机械工程
资助企业:
 上海赛威德机器人有限公司
上海赛威德机器人有限公司
资助年份: 2026
企业导师: 刘亮

指导教师: 王皓
项目成员: 关天灼、黄昱钧、罗家省、杨鑫略
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
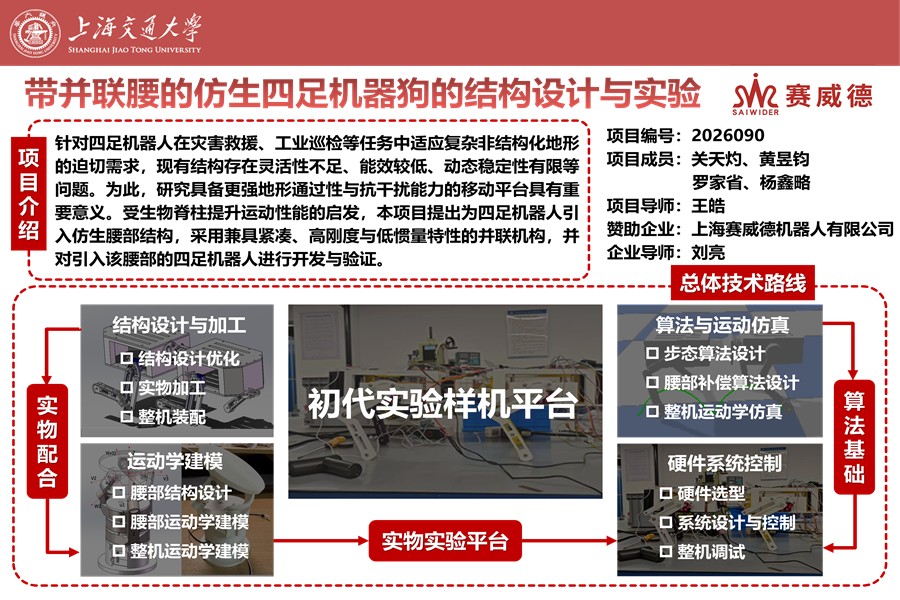
针对四足机器人在灾害救援、工业巡检等任务中对复杂非结构化地形适应能力的迫切需求,现有传统结构常面临灵活性不足、能效较低及动态稳定性有限等挑战。为此,研究具备更强地形通过性与抗干扰能力的移动平台具有重要意义。受生物脊柱可显著提升运动性能的启发,本项目提出为四足机器人引入仿生腰部结构,以增强其整体运动能力。通过构型对比,选用兼具结构紧凑、高刚度和低惯量特性的并联机构,并对引入该腰部结构的四组机器人进行开发验证。
项目目标
本项目旨在设计一款基于共轴球面并联腰部结构的四足机器人。首先,需完成机器人建模和实物加工,通过腿部构型选型、拓扑优化、关节可靠性设计等实现具有良好结构特性的机身。同时开展腰部结构设计,通过运动学建模和分析,实现具有高刚度、结构紧凑的三自由度腰部机构。此外,还需进行步态控制、足端轨迹规划和腰部运动补偿算法开发,并搭建虚拟样机进行运动仿真验证。最后,需搭建可靠的嵌入式硬件控制平台,实现上下位机通信,并对整机进行调试以验证整体方案可行性。
项目成果
(1) 完成四足机器人整体与腿部结构设计,通过拓扑优化和力学优化实现腿部轻量化与高刚度优化,并完成实物加工迭代。
(2)完成腰部结构设计、运动学分析与实物加工,同时建立无腰与含腰整机运动学模型。
(3)设计基于CPG的步态控制、足端轨迹规划算法与腰部运动补偿控制策略,并在PyBullet中进行运动仿真验证。
(4)搭建系统硬件与控制方案,包括围绕STM32的底层驱动与通信、供电系统迭代、腿部及腰部舵机调试。




