

三维光学柔性检测方案
最受欢迎奖
资助企业:
 上海伊丰精密仪器有限公司
上海伊丰精密仪器有限公司
资助年份: 2026
企业导师: 王俊亮

指导教师: 陈晓波
项目成员: 欧阳建渝、黄宇光、罗鼎壹
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
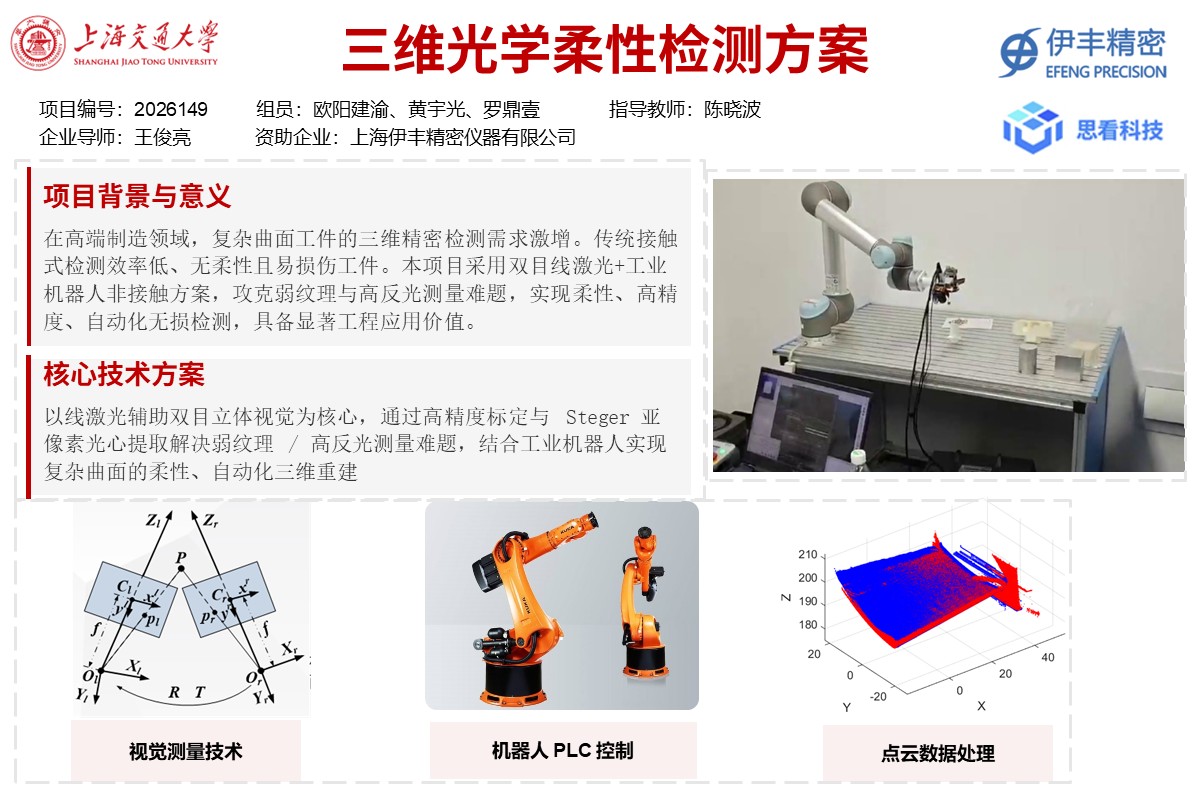
项目概述
本项目面向航空航天、精密模具等领域对复杂曲面工件三维检测的迫切需求,开发了一套基于视觉的三维光学柔性检测方案。系统采用“眼在手上”架构,将双目线激光视觉测量单元集成于UR机器人末端,通过手眼标定、视点规划与路径规划实现多视角自动扫描。针对弱纹理、高反光等难题,引入线激光投影与Steger亚像素光心提取算法,结合双目立体匹配实现高精度三维重建。项目覆盖了从传感器研制、系统标定、点云处理到精度评估的全流程,旨在替代传统接触式检测,实现高柔性、高效率、非接触的自动化检测。
项目目标
项目核心目标是开发一套高柔性、高精度、高效率的非接触式三维检测解决方案。具体包括:(1)实现复杂曲面的全方位可达检测,通过工业机器人运动平台适应多样化工件需求;
(2)确保系统对金属被测表面、弱纹理表面的测量精度;
(3)提升检测效率,利用非接触扫描与机器人自动路径规划缩短整体检测时间;
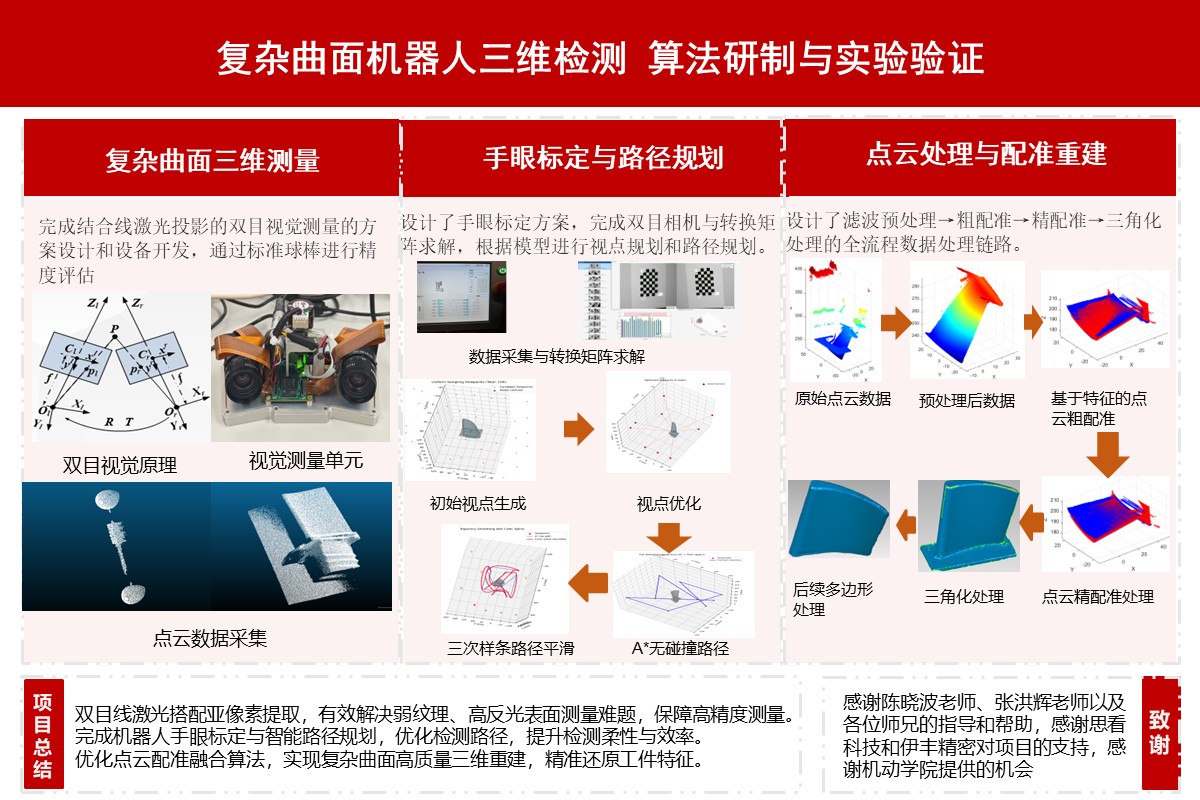
(4)完成从点云采集、预处理、配准融合到多边形重建的完整技术流程,并基于涡轮叶片等典型工件进行实验验证。
项目成果
项目成功搭建了三维光学柔性检测系统实验平台,完成了UR机器人+双目线激光传感器的集成与联调。实现了以下关键技术成果:
(1)双目视觉标注重投影误差达标,Steger亚像素提取提升光心定位精度;
(2)通过双目相机结合线激光扫描,实现了对被测物的点云数据采集,对标准球棒的测量误差小于0.0074mm;
(3)手眼标定最大位置误差5.03 mm,方向一致性良好;
(4)基于模型的三维视点规划与无碰撞路径规划算法验证有效;
(5)点云处理方面,实现了DLFS+LRF粗配准与双向搜索ICP精配准,显著提升配准鲁棒性;
(6)完成了涡轮叶片从扫描、配准到多边形重建的全流程实验,生成了高质量STL网格模型。项目为复杂曲面高精高效无损检测提供了完整解决方案。




